项目背景
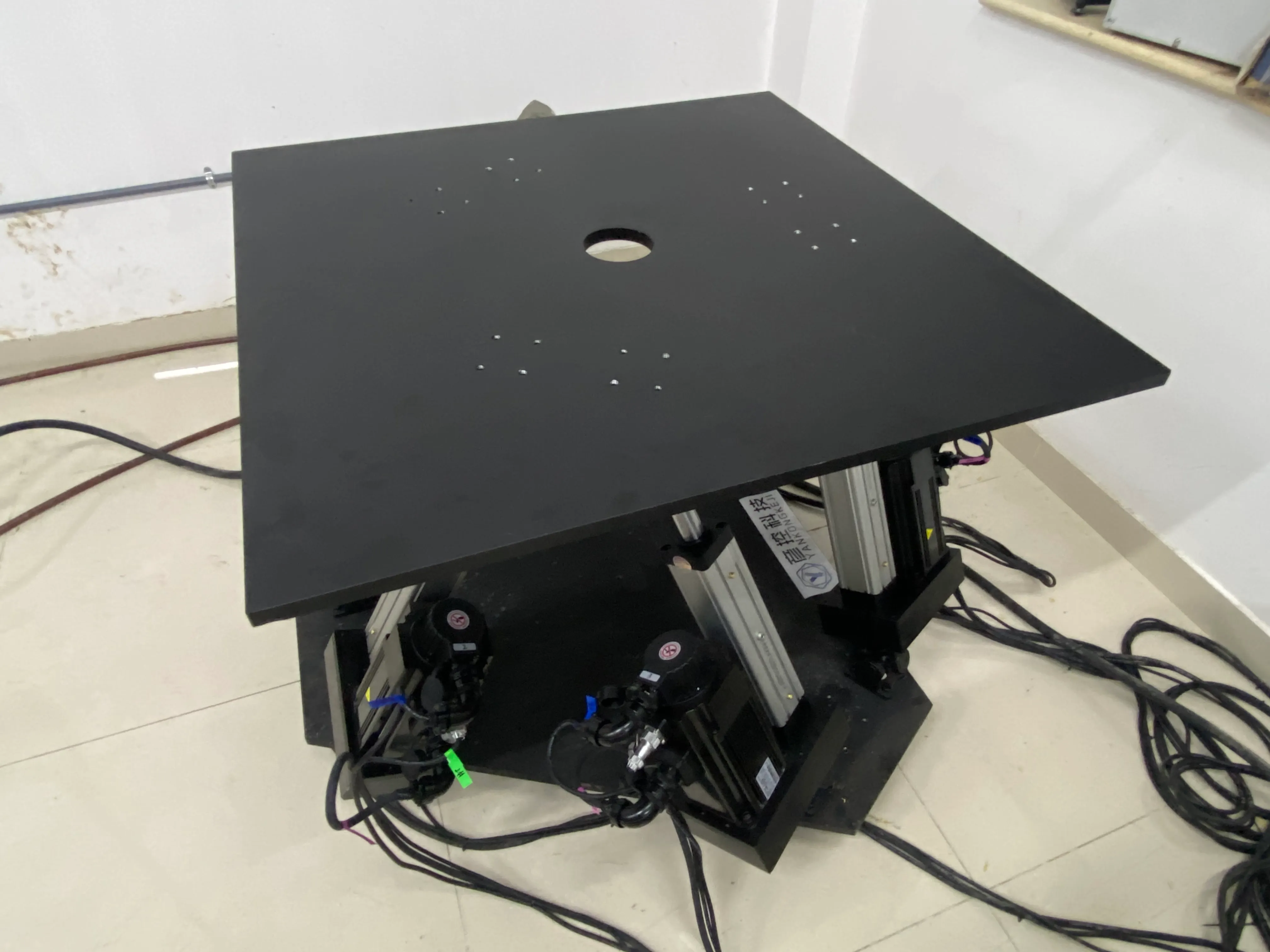
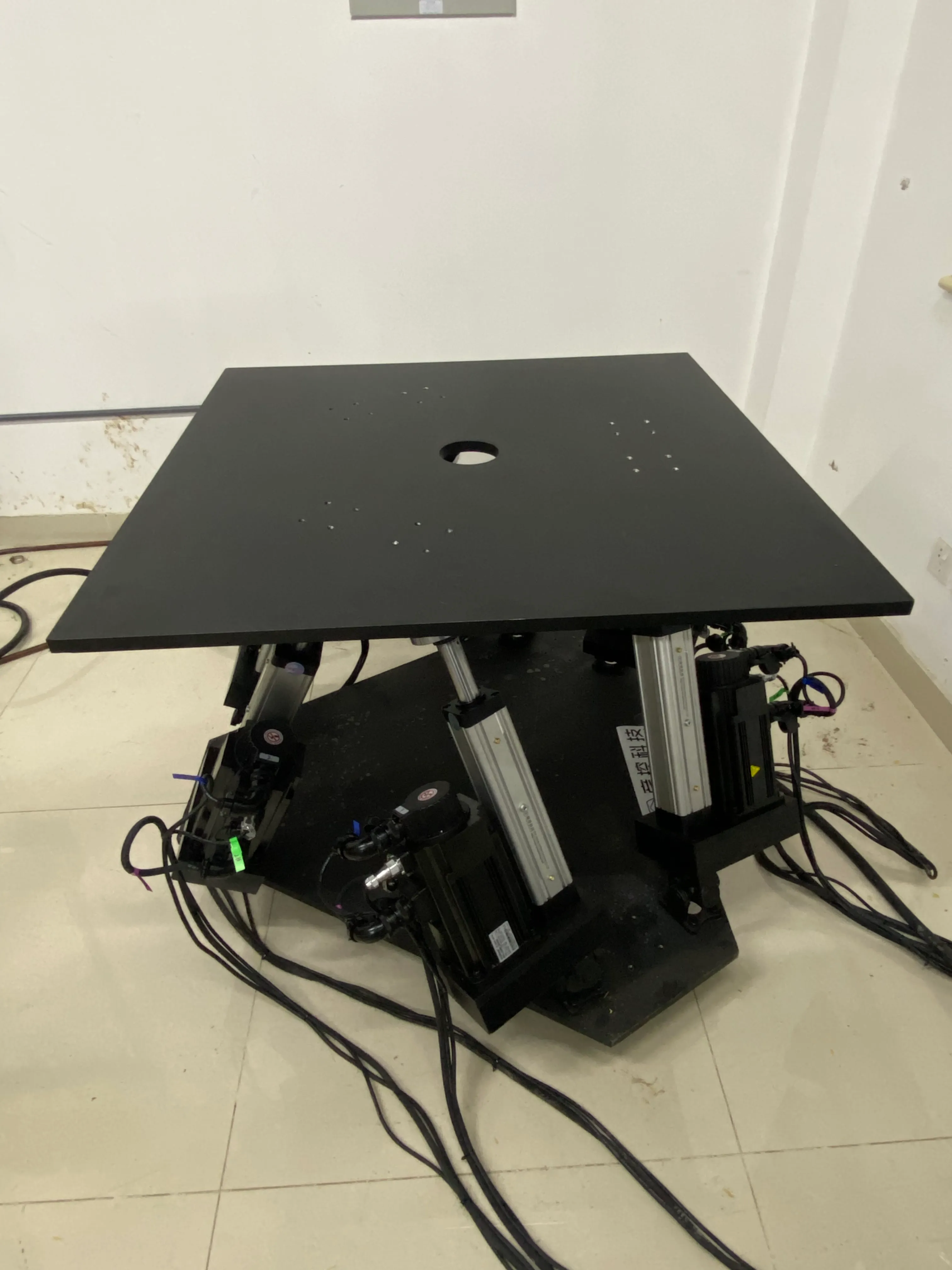
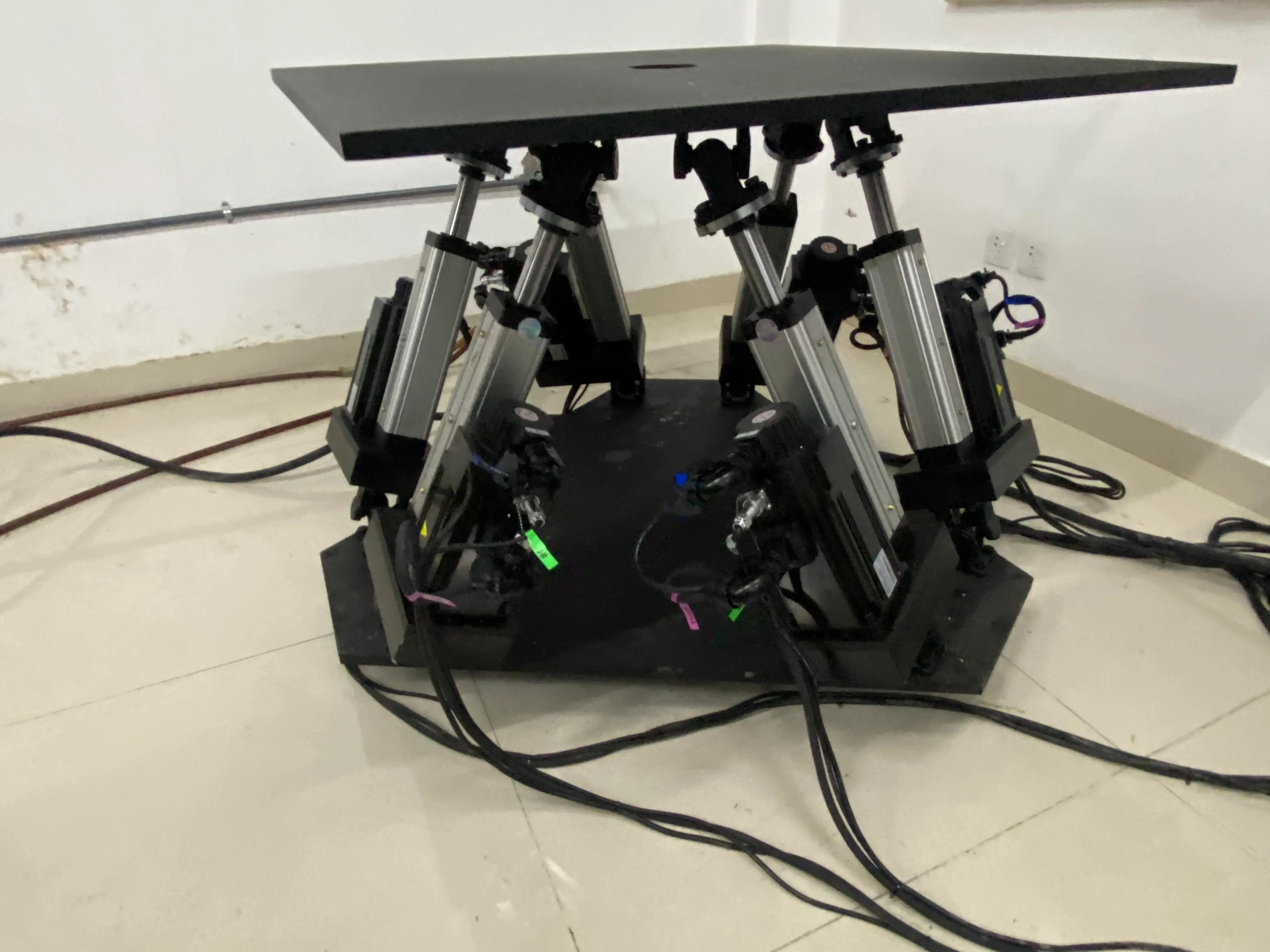
河北工业大学车辆工程与机器人方向的教学科研需要一套多自由度耦合控制平台,支撑从本科实验到研究生课题的完整链路。
选型考量
| 维度 | 现状 | 彦控方案 |
|---|---|---|
| 自由度 | 单轴/简化机构 | 6-DOF 完整耦合 |
| 接口开放度 | 商用封闭 | UDP / Matlab / Python 完全开放 |
| 学生上手 | 需教师协助 | 配套 SDK + 实验指导 |
| 售后响应 | 进口慢 | 国内 48 小时 |
实施时间线
- 2023 年 3 月:需求确认 + 方案设计
- 2023 年 4 月初:整机生产 + 出厂测试
- 2023 年 4 月 24 日:现场安装 + 调试 + 验收 + 师生培训
应用场景
系统投入使用后支撑了实验室在以下方向的教学与研究:
- 并联机构正反解教学 — 通过 SDK 实时输入位姿,观察各执行杆运动
- 多自由度轨迹规划研究 — 复杂空间轨迹的规划与跟踪
- 多模态控制对比实验 — PID / LQR / MPC 算法在六自由度系统上的对比
- 本科生课程实验 — 标准化实验书 + 一键启动模式,零门槛上手